
AFT200-D80 eCAN connection guide
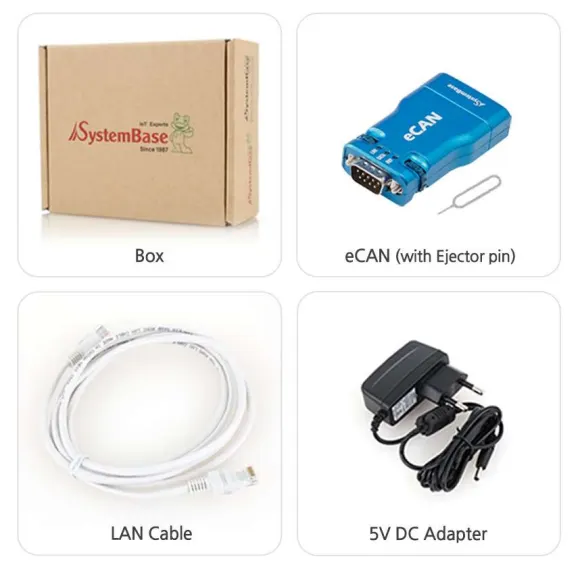
Systembase eCAN (CAN to EtherNET 변환 장치)
케이블 연결
•
케이블 핀정도(pin out)
◦
길이: 3m
◦
5V(VCC) - 주황색, 검은 점
◦
GND - 회색, 검은 점
◦
CANH- 노란색, 검은 점
◦
CANL - 핑크색, 검은 점
◦
연결 PCB 설치 가이드
▪
먼저 위 와이어의 와이어 피복을 제거하십시오
▪
다음 그림과 같이 라인을 삽입하고 터미널 위의 볼트를 체결합니다
▪
각 연결부는 PCB 연결부에 기재되어 있으며 순서는 다음과 같습니다

1.
센서 쪽 커넥터 (센서와 연결되는 커넥터부)
2.
EtherNET 커넥터 (PC와 연결되는 커넥터부)
3.
센서 쪽 커넥터 (선택사항)→ 케이블을 절단하여 직접 연결하는 경우에 한해 사용
a.
상단 2포트 터미널 블럭 : VCC, GND
b.
하단 4포트 터미널 블럭l : VCC, GND, CAN High, CAN Low
▪
VCC 및 GND는 안정적인 5V를 지원하는 전원 공급 장치와 연결해야 합니다
▪
9핀 D-서브는 eCAN 장치에 연결됩니다
승인된 전원 공급 장치의 사옹을 권장합니다
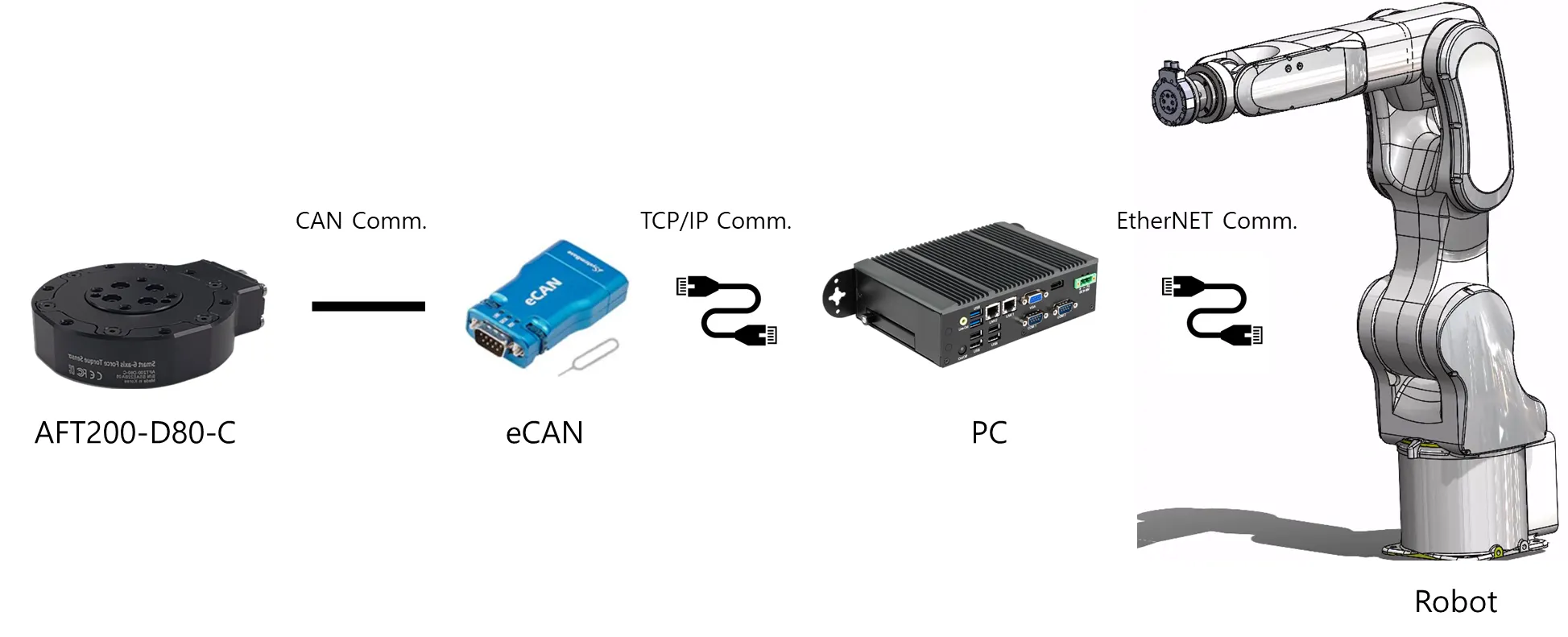
연결 개요
•
AFT200-D80-C ←→ eCAN(CAN to EtherNET converter) ←→ PC ←→ 로봇
•
아래와 같은 힘/토크 센서의 연결 지침을 따르십시오.
•
힘/토크 센서를 PC에 전달하기 위한 TCP/IP 설정에 대한 자세한 내용은 섹션 3. 시스템 개요를 참조하십시오.
•
로봇과의 EtherNET 통신 설정에 대한 자세한 내용은 섹션 5. 소프트웨어 에 기재되어 있습니다.
연결 및 설치 절차는 설치 전문가가 수행해야 하며 설치 절차 진행 전에 반드시 이 설명서를 읽어야 합니다.
•
자세한 설정 정보는 같이 제공된 “eCAN_UserManual_Kor_v1.0” 파일 참조
•
힘/토크 센서의 IP (TCP Client, 고정) : 192.168.0.223
•
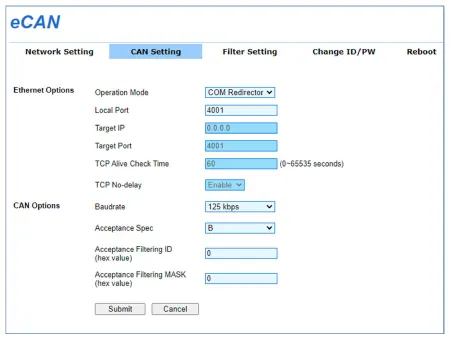
AFT200-D80-C 사용을 위한 필수 설정:
◦
CAN Baudrate setting (16 쪽 eCAN manual)
▪
EtherNET options → Operation Mode : TCP Server
▪
CAN Options →Baudrates : 125kbps → 1000kbps
SystemBase 메뉴얼
통신 설정 방법 및 예제
EtherNET 통신 예제
1.
Windows
2.
Linux, ROS